
Interface électrique¶
Avertissements et mises en garde¶
Danger
Veuillez vous assurer que l’ensemble des équipements et des câbles soient secs. Si de l’eau entre dans l’équipement, débrancher le câble l’alimentation;
Il est important de suivre avec précaution les consignes de securité dans la section suivante afin d’éviter d’endommager votre robot.
Attention
Ne pas débrancher ou éteindre le robot pendant son utilisation, vous risqueriez d’endommager la Raspberry Pi 4 du robot, ou la carte micro SD qui s’y trouve.
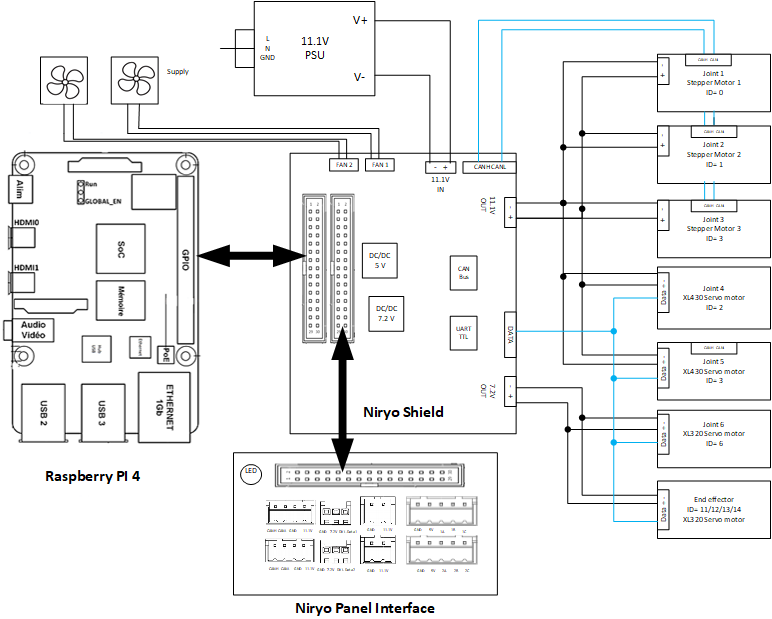
Panneau de connecteurs¶
Vue d’ensemble du Panneau de connecteurs¶


1 |
2 x Port USB 2.0 |
2 |
2 x Port USB 3.0 |
3 |
Port Ethernet |
4 |
Panneau LED |
5 |
2 x Connecteur NiryoStepper |
6 |
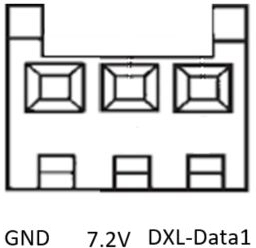
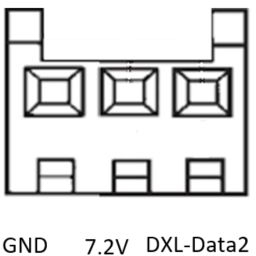
Connecteur XL320 |
7 |
Connecteur XL430 (non utilisé) |
8 |
2 x SW : 12 V sortie digitale |
9 |
2 x Panneau GPIO |
10 |
Bouton supérieur |
Alimentation électrique¶
Ned est alimenté par un adaptateur AC/DC avec une sortie 11.1V.
Paramètres |
Valeur |
|---|---|
Fréquence |
50/60 Hz |
Entrée |
AC 100-240 V , 1.5 A |
Sortie |
11.1 V – 6 A |
Attention
Quand Ned est allumé, veuillez ne pas déconnecter son alimentation électrique. Vous risqueriez d’endommager la Raspberry Pi 4 du robot, ou sa carte micro SD.
Si vous modifiez l’alimentation électrique originale du robot, assurez vous de respecter les mêmes spécifications.
Avant de brancher le connecteur électrique et d’allumer Ned, assurez-vous que :
Ned est sur une surface plane et stable;
Le commutateur d’alimentation est éteint (position O);
Ned a suffisament d’espace autour de lui pour ne pas heurter quelque chose ou quelqu’un.
Commutateur d’alimentation¶
Le commutateur d’alimentation permet d’alimenter le robot en électricité, de la même manière que le bouton d’alimentation d’un ordinateur fixe.
Veillez à toujours l’éteindre après avoir éteint le robot de manière logicielle (Niryo Studio, bouton du haut, ou ligne de commande).
Attention
Avant de brancher ou de débrancher l’alimentation électrique, assurez vous d’éteindre le commutateur.
Ne pas garder le commutateur allumé après avoir éteint Ned, autrement, le courant sera toujours présent dans les moteurs et dans la carte de contrôle moteur.
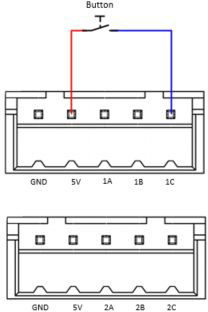
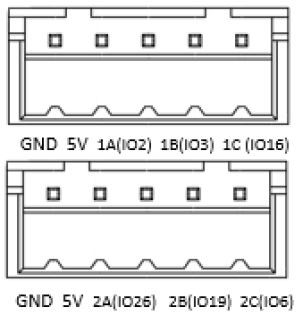
Entrées/sorties digitales¶
Ned has 6 inputs/outputs that can be configured either as digital input or digital output with Niryo Studio (see How to program the digital I/O on the Software Manual).
Terminal |
Paramètres |
Min |
Max |
Unité |
|---|---|---|---|---|
Entrée Digitale |
||||
[1A-2A-1B-2B-1C-2B] |
Tension |
0 |
5 |
V |
Sortie Digitale |
||||
[1A-2A-1B-2B-1C-2B] |
Tension |
0 |
5 |
V |
Connexion de l’entrée digitale :
L’illustration ci-dessous montre comment connecter un bouton à l’entrée digitale.
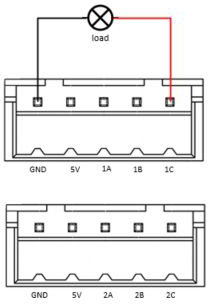
Connexion de la sortie digitale :
Cet exemple montre comment connecter une charge à contrôler depuis une sortie digitale (voir ci-dessous).
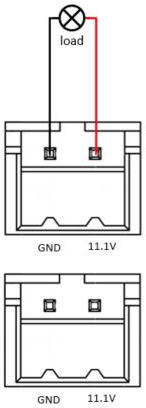
Connexion des commutateurs¶
Terminal |
Paramètres |
Min |
Max |
Unité |
|---|---|---|---|---|
Sortie digitale |
||||
SW1, SW2 |
Tension |
0 |
11.6 |
V |
Courant |
0 |
0.5 |
A |
|
Retrouvez ci-dessous un exemple de connexion avec une charge externe depuis la sortie commutateur.
Ethernet¶
Une connexion Ethernet est fournie sur le panneau des connecteurs du robot.
L’interface Ethernet peut être utilisée pour :
Modbus TCP/IP;
PyNiryo;
Connecter Ned à votre réseau local.
Port USB¶
L’USB peut être utilisé pour connecter un clavier, une souris ou le Set Vision.
Retrouvez plus d’informations à propos du Set Vision dans son Manuel d’utilisation.
Connecteurs NiryoStepper¶
L’interface connecteurs des NiryoSteppers peut être utilisée pour utiliser un moteur NiryoStepper. Elle est basée sur le protocole de communication CAN Bus.
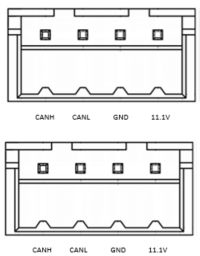
Cette interface peut être utilisée pour contrôler le Convoyeur.
Connexion DXL¶
Panneau LED¶
Le panneau LED de Ned a plusieurs couleurs qui représentent ses différents modes ainsi que les différents statuts d’erreur. Pour plus d’informations, se référer au tableau suivant :
Couleur / Clignotement |
Description |
Dépannage |
|---|---|---|
Bleu fixe |
En mode hotspot, le robot a démarré et a créé son propre réseau Wi-Fi. |
N/A |
Vert fixe |
En mode connecté, le robot a démarré et est connecté à un réseau Wi-Fi. |
N/A |
Alternance vert / rouge |
Erreur moteur en mode Wi-Fi. |
Verifier le “HARDWARE STATUS“ et les logs pour dépanner l’erreur. |
Alternance bleu / rouge |
Erreur moteur en mode hotspot. |
Verifier le “HARDWARE STATUS“ et les logs pour dépanner l’erreur. |
Violet fixe |
Le contrôleur du robot s’éteint. |
N/A |
Alternance blanc / vert |
Le robot est en pause en mode Wi-Fi. |
N/A |
Alternance blanc / bleu |
Le robot est en pause en mode hotspot. |
N/A |
Rouge fixe |
Au démarrage : le robot démarre; |
N/A |
Bouton supérieur¶
Le bouton supérieur de Ned a de multiples fonctionnalités, en fonction de la durée de la pression appliquée ou du nombre de pressions.
Note
Toutes les fonctionnalités ne sont disponibles qu’après que le robot ait totalement démarré (LED verte ou bleue).
Délai / Nombre de pression |
Fonction |
|---|---|
Un programme est en cours d’exécution |
|
1 pression - 0.1 et 3s |
Mise en pause du programme avec le mode apprentissage désactivé. |
2 pressions – 0.1 et 3s |
Mise en pause du programme avec le mode apprentissage activé. |
Un programme est en pause |
|
1 pression - 0.1 et 3s |
Reprend le programme. |
2 pressions – 0.1 et 3s |
Stoppe le programme. |
Un programme est définit en lancement automatique |
|
1 pression - 0.1 et 3s |
Démarre le programme enregistré |
Programmation du robot avec Blockly |
|
1 pression - 0.1 et 3s |
Ajoute/sauvegarde une position en mode apprentissage |
Note
Quand vous mettez en pause le programme avec le bouton supérieur, vous pouvez soit presser le bouton pour reprendre le programme ou appuyer deux fois pour l’arrêter.
Indication
Il est possible de tester le matériel pour la toute première fois sans utiliser aucun logiciel car un programme est programmé en usine pour un lancement automatique. Pour cela, suivre les étapes suivantes :
Brancher l’alimentation du robot;
Allumer le commutateur d’alimentation;
Attendre jusqu’à ce que le panneau LED devienne bleu (si c’est la première fois que vous utilisez Ned, cela prend environ deux minutes);
Presser le bouton supérieur : Ned commencera par une calibration, puis il exécutera une séquence pré-enregistrée.
Installation des outils¶
Gripper Custom, Gripper Large et Gripper Adaptatif :¶
Il y a un câble sur l’extrêmité de bras avec 3 broches. Ce connecteur permet de contrôler le Gripper Custom, le Gripper Large ou le Gripper Adaptatif.
Note
Veuillez vous assurer de respecter l’ordre des couleurs lors du branchement du Gripper. Un détrompeur est présent afin de prévenir toute erreur de connexion.
Attention
Ne pas respecter les instructions de branchement pourrait endommager l’outil ou le robot.
Pompe à vide :¶
Connecter la ventouse à l’extrêmité du bras et connecter le câble du moteur au connecteur XL-320 placé à l’arrière de Ned.
Électroaimant :¶
Brancher l’Électroaimant à la main de Ned et connecter le câble sur le connecteur GPIO1 ou GPIO2 sur le panneau des connecteurs.
Note
Information about programming and using the tool are available on the Software Manual